
Material:
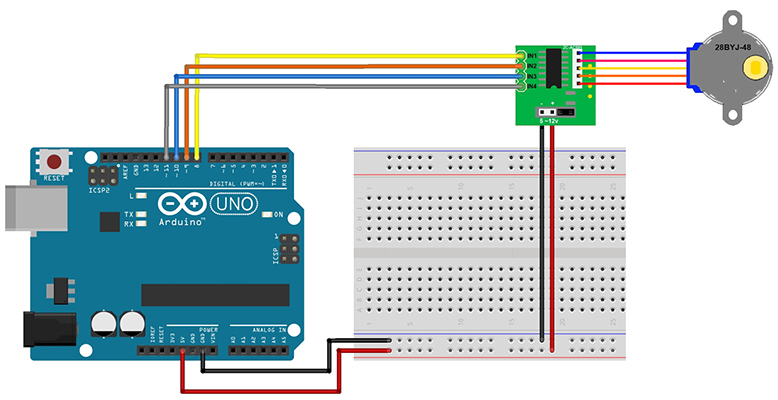
1 tarja Arduino UNO, 1 motor pas a pas bipolar 28BYJ-48 5V, 1 controladora de motors ULN2003, 6 cables Dupont.
Descripció:
Desplaçament del gir d’un motor pas a pas a través dels graus d’una circumferència. El motor s’atura en el punt especificat per l’usuari entre el rang expressat d’entre 0 i 360 graus. S’utilitza el monitor sèrie per entrar les dades. En la pràctica amb Arduino IDE no s’utilitza cap llibreria, però amb la pràctica amb mBlock es fa servir la llibreria “stepper.h” que caldrà instal·lar des de mBlock / Extensions / Manage extensions / Stepper (Thomas Goorden).
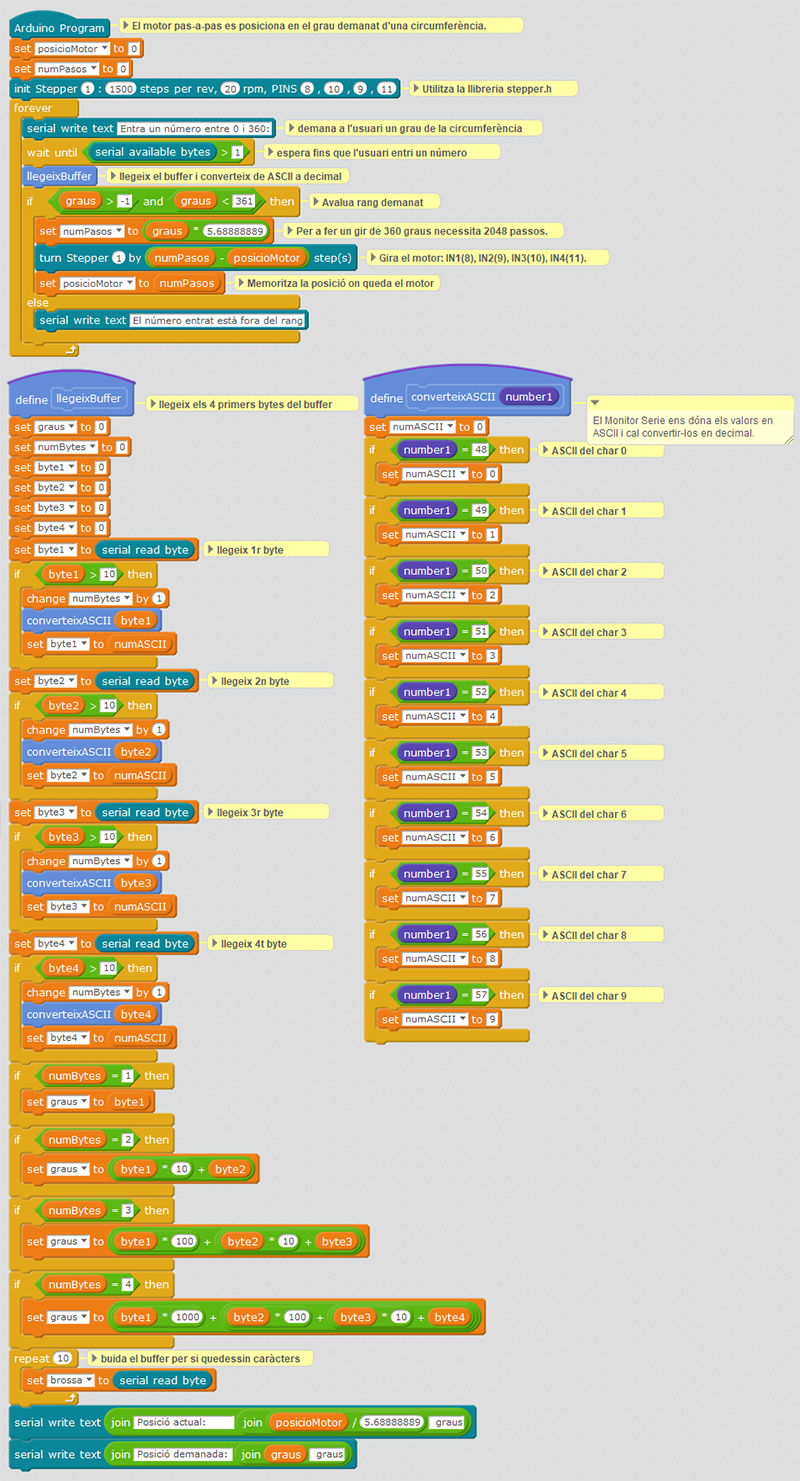
S’utilitzen els ports 8, 9, 10 i 11 connectats a IN1, IN2, IN3 i IN4 de la controladora ULN2003 respectivament.
El monitor sèrie de mBlock retorna els valors entrats en format ASCII i cal fer una conversió a números.
El motor necessita de 4 passos per a fer una sola rotació de l’eix del motor. Tenint en compte tots els engranatges reductors que porta incorporats necessita 512 rotacions del motor per a descriure els 360 graus d’una circumferència. Tot plegat implica un total de 2048 passos (512 x 4). En la programació d’Arduino IDE ens referim a les 512 rotacions del motor, mentre que en la programació de mBlock ens referim als 2048 passos necessaris per a recórrer els 360 graus.
Esquema:
Programació amb Arduino IDE:
Programació amb mBlock:
Descàrregues:
![]()
![]()