Material:
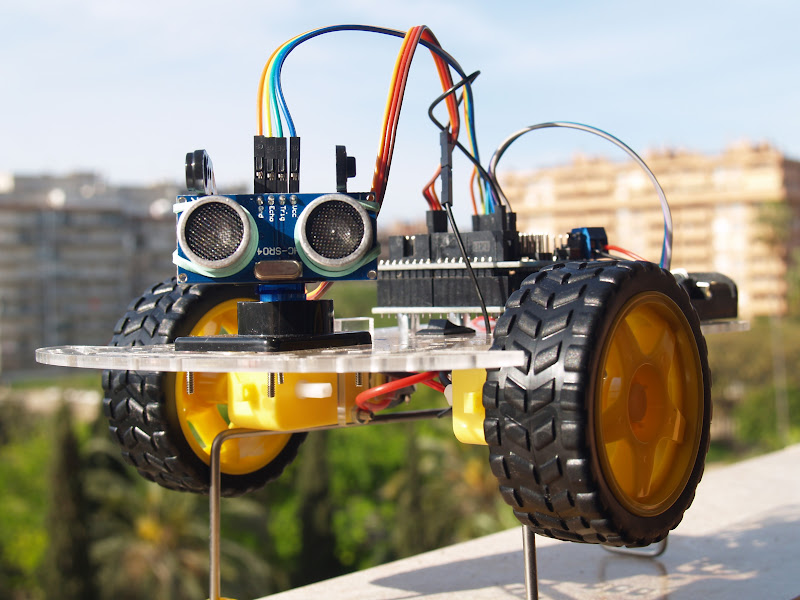
1 Xassís del robot de 2 rodes, 1 Controladora dels motors L298N, 1 Escut de sensors Arduino v5.0, 1 Tarja Arduino UNO R3, 1 Sensor de distància HC-SR04, 1 Servo motor SG90, 1 Suport del servomotor FPV, 13 cables Dupont.
Descripció:
El robot avança fins que troba un obstacle a 30 cm. Llavors calcula la distància a la seva dreta i a la seva esquerra i pren la direcció en la que no troba cap obstacle.
Esquema:

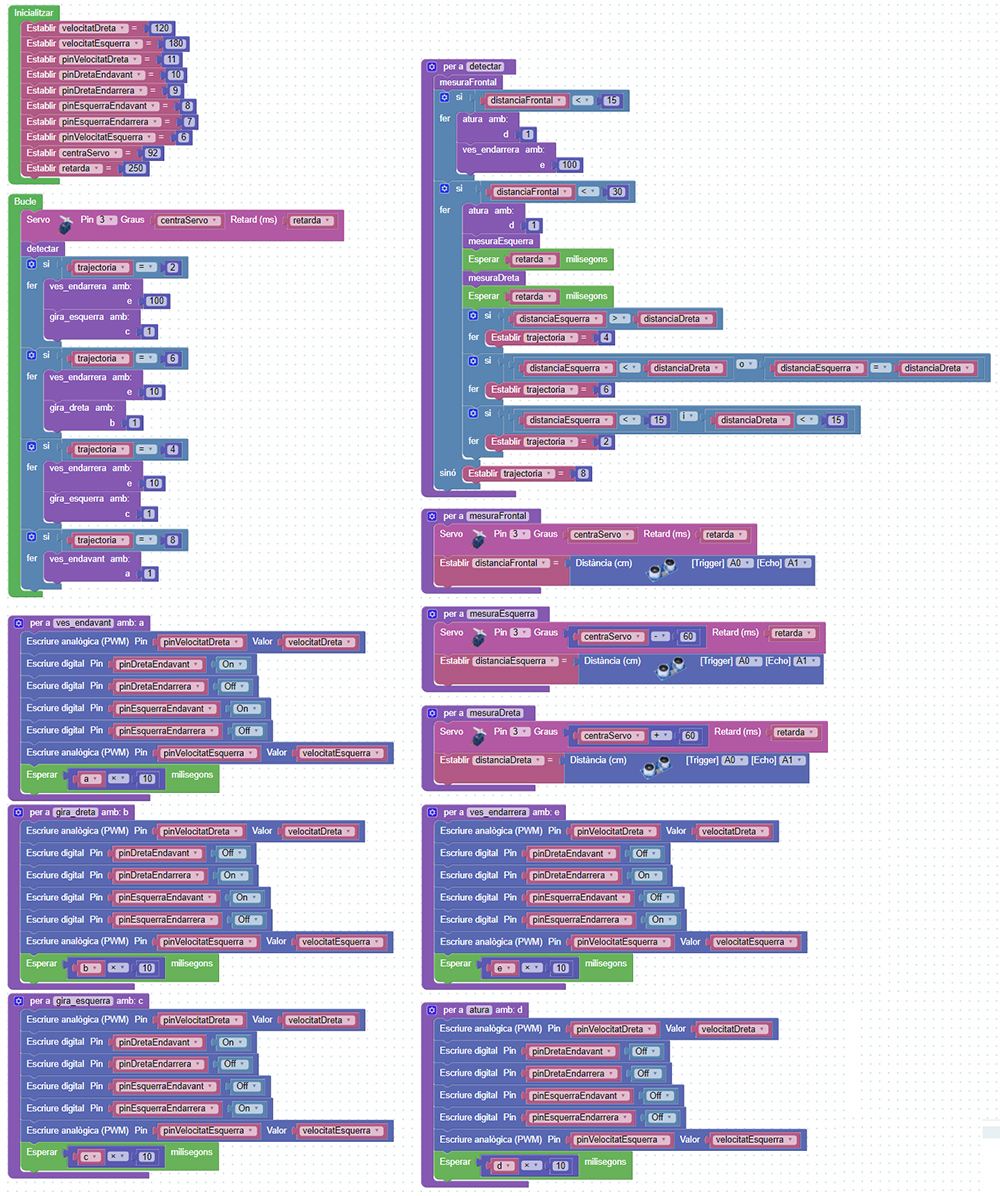
Programació amb ArduinoBlocks:
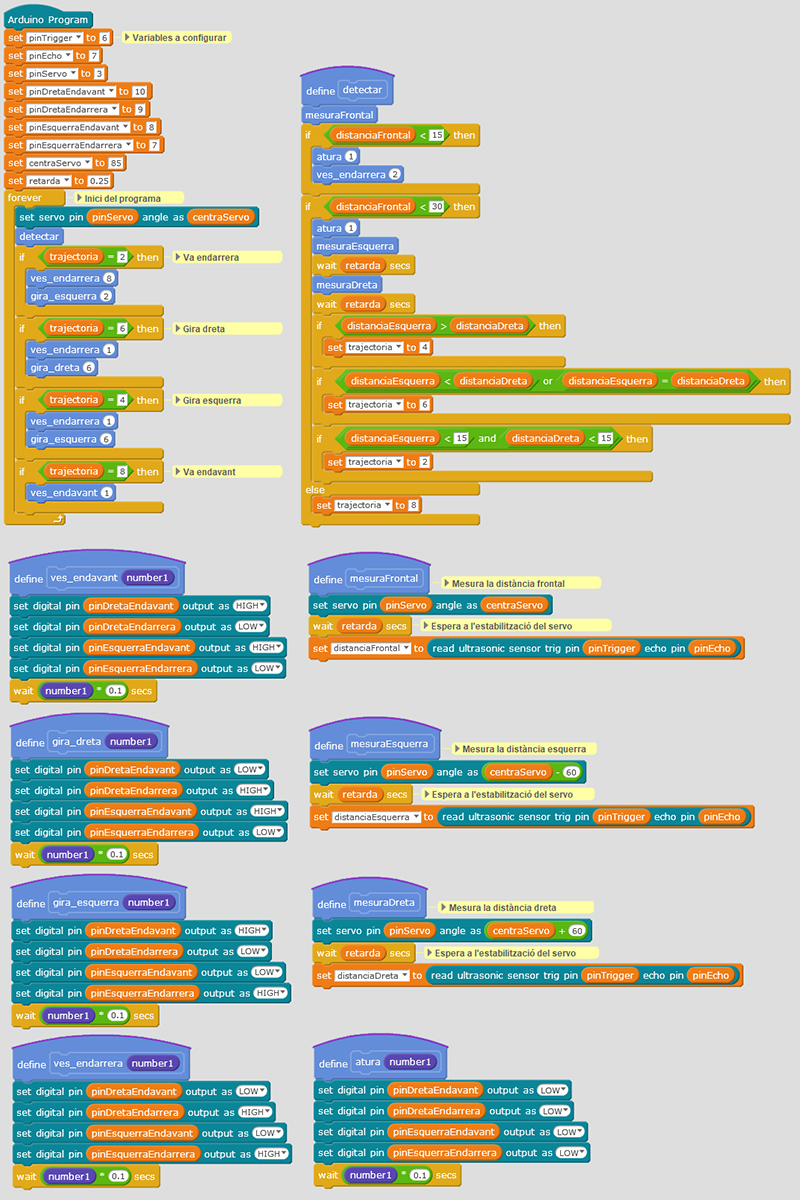
Programació amb Arduino IDE:
Programació amb mBlock:
Descàrregues:
![]()
![]()
![]()
Fotos: